Robotic Baker
The final project for my robotics class was a daunting task: as a class, we had to build a robot that would take cake ingredients and turn it into a baked and frosted cake entirely autonomously. (As if that weren't enough, it had to frost a picture that we would only get to see the day of the demonstration).
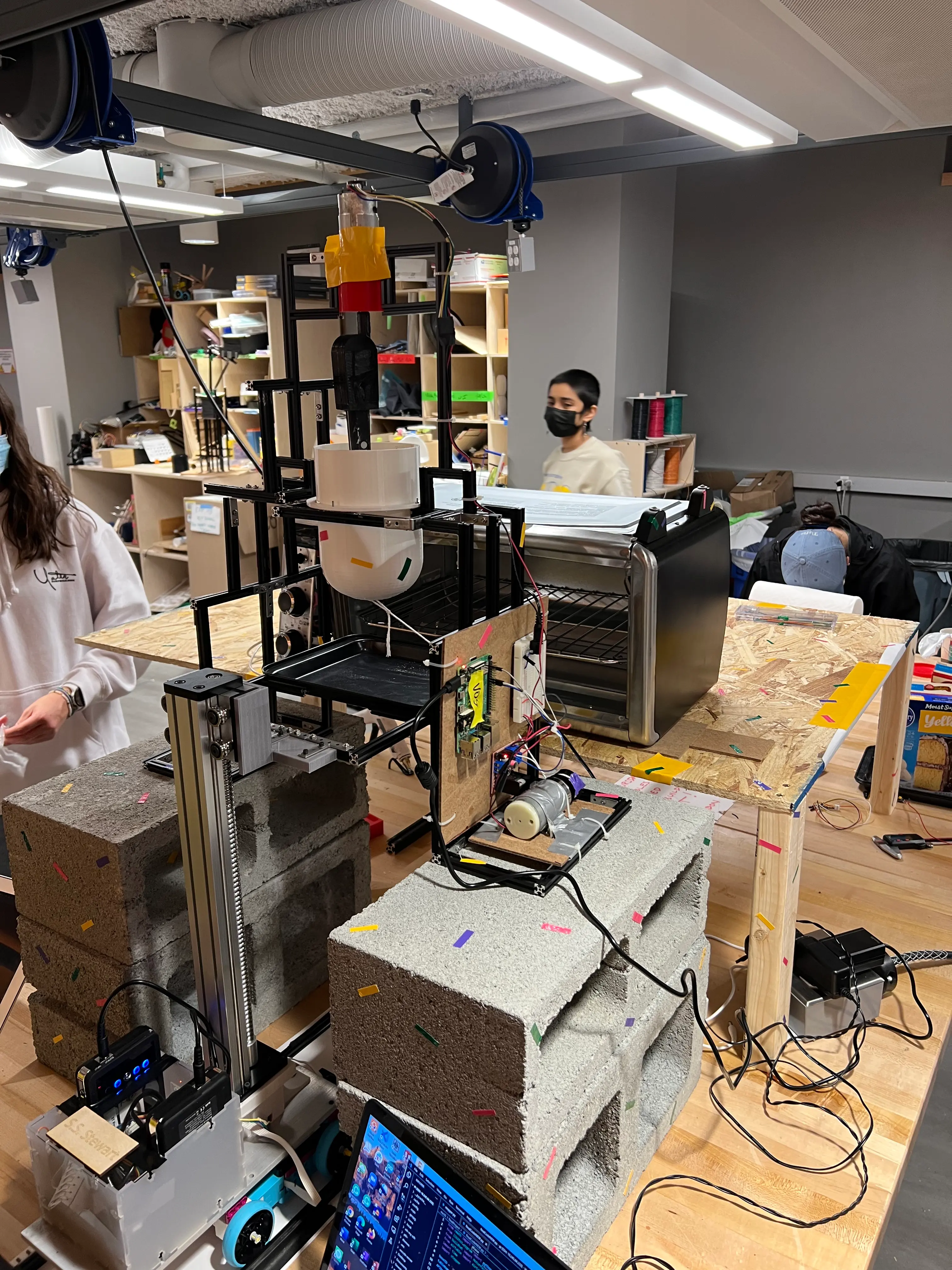
I joined the mixing team because my initial team (oven control) ended up with too many people. Our task was to take the liquid and dry ingredients for a cake and mix them into batter before depositing it into a pan for baking.
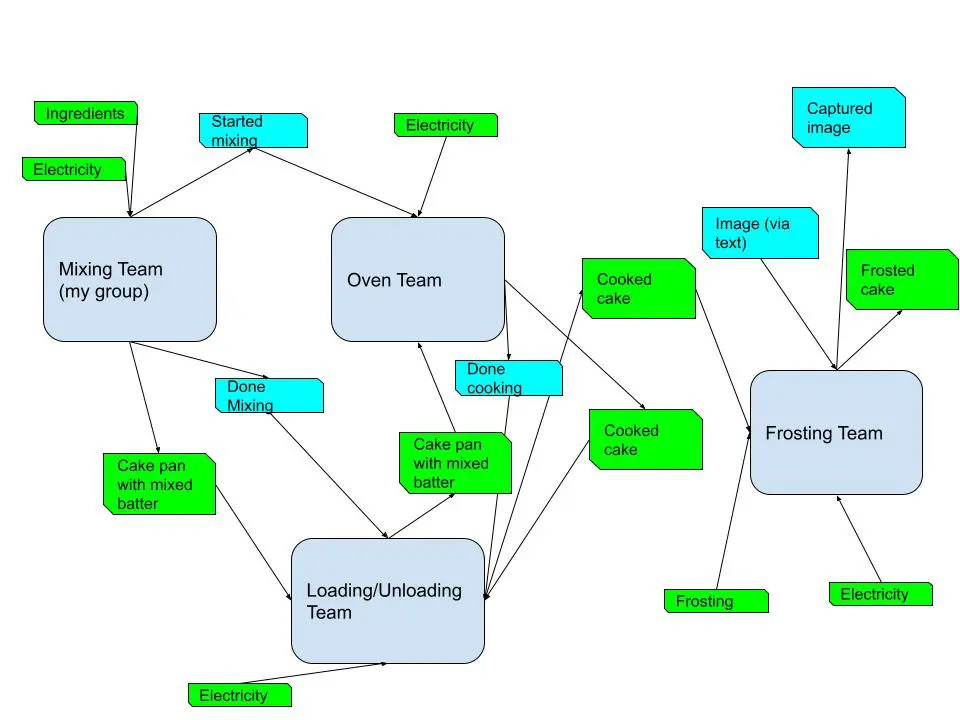
Another role I took in the creation of the mixing robot was software development. I programmed the physical outputs of the motor (i.e., mixing and opening the bowl), while Lera provided the Airtable code for me to integrate. The class used Airtable to coordinate different phases of the process by pushing and getting information from a table online. This allowed our group to know when to start mixing and to tell the load/unload robot when we were done pouring our batter.
If we were to make the mixing robot again, I would like to use a narrower bowl. Even with the off-center whisk, the sides were not fully scraped so we had to use extra ingredients to get a sufficient amount of batter from the process. This is inefficient and improving the bowl design would minimize waste and increase productivity.